Traitement du signal
Bibliographie
J. Max et J.-L. Lacoume, Méthodes et techniques de traitement du signal, Dunod, \(5\)ème édition, \(2004\).
Athanasios Papoulis and S. Unnikrishna Pillai, Probability, Random Variables and Stochastic Processes}, McGraw Hill Higher Education, \(4\)th edition, 2002.
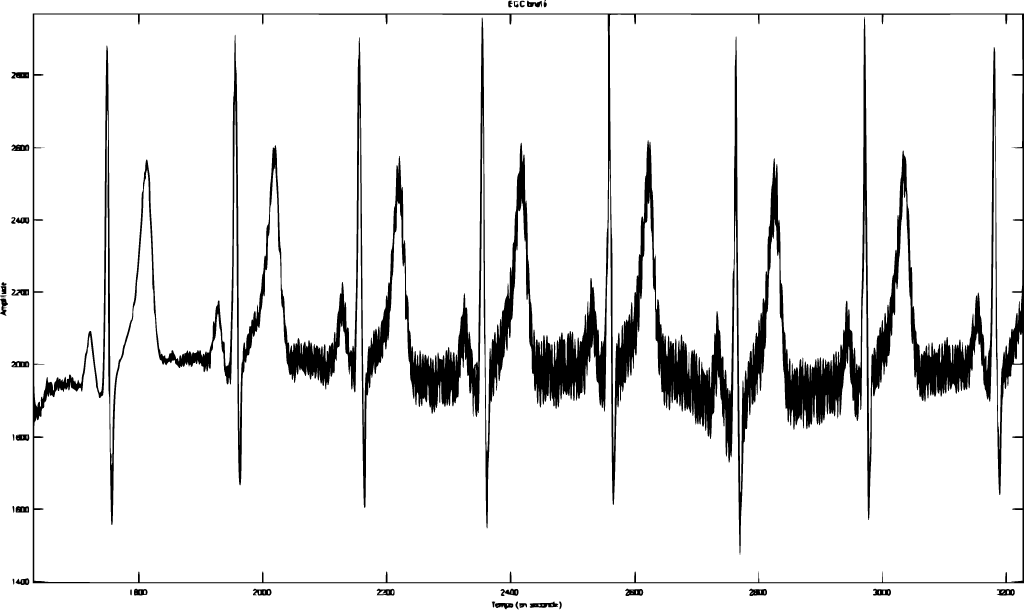
Electrocardiogramme
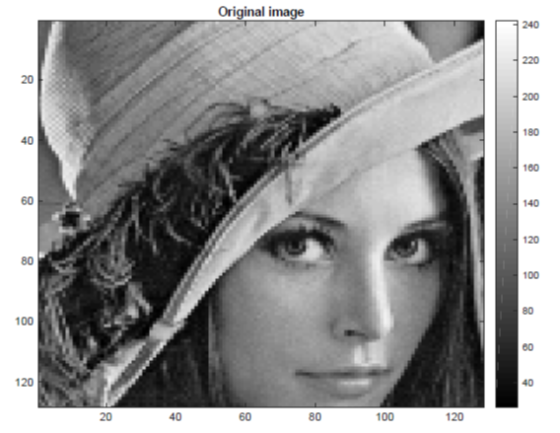
Lena
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
Plan du cours
Chapitre 1 : Corrélations et Spectres
- Transformée de Fourier
- Classes de signaux déterministes et aléatoires
- Propriétés de \(R_x(\tau)\) et de \(s_x(f)\)
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
Transformée de Fourier
Définitions
- Formule directe
\[X(f)=\int_{\mathbb{R}} x(t) \exp \left( - j 2 \pi ft \right) dt\]
- Formule inverse
\[x(t)=\int_{\mathbb{R}} X(f) \exp \left( j 2 \pi ft \right) df\]
Hypothèses : TF sur \(\mathcal{L}^1\) ou \(\mathcal{L}^2\)
Propriétés
Linéarité \[\textrm{TF} \left[a x(t)+ by(t) \right] = a X(f) + bY(f)\]
Parité : \(x(t)\) réelle paire \(\Rightarrow\) \(X(f)\) réelle paire
Translation et Modulation : \[\begin{align*} &\textrm{TF} \left[x(t-t_0) \right] = \exp (-j2 \pi f t_0) X(f)\\ &\textrm{TF} \left[x(t) \exp (j 2 \pi f_0 t)\right]=X(f-f_0) \end{align*}\]
Similitude :
\[\textrm{TF} \left[x(at) \right] = \frac{1}{|a|} X \left(\frac{f}{a}\right)\]
Propriétés
Produit de convolution :
- Définition
\[\begin{aligned} y(t)=(h * x)(t)=h(t)*x(t)&= \int_{-\infty}^{\infty} x(\tau) h(t-\tau) d \tau \\ &=\int_{-\infty}^{\infty} x(t-\tau) h(\tau) d \tau \end{aligned}\]
- TF
\[\begin{aligned} &\textrm{TF} \left[ x(t) * y(t) \right] = X(f) Y(f)\\ &\textrm{TF} \left[ x(t) y(t) \right] = X(f) * Y(f) \end{aligned}\]
- Egalité de Parseval :
\[ \int_{\mathbb{R}} x(t) y^*(t) dt = \int_{\mathbb{R}} X(f) Y^*(f) df \]
Distributions
- Localisation :
\[x(t) \delta(t-t_0) = x(t_0) \delta(t-t_0)\]
- Produit de Convolution :
\[x(t) * \delta(t-t_0) = x(t-t_0)\]
- Transformées de Fourier :
\[\begin{aligned} &\textrm{TF} \left[ \delta(t) \right] = 1, \; \textrm{TF} \left[ 1 \right] = \delta(f)\\ &\textrm{TF} \left[ \delta(t-t_0) \right] = \exp (- j 2 \pi f t_0), \; \textrm{TF} \left[ \exp (j 2 \pi f_0 t) \right] = \delta(f-f_0) \end{aligned}\]
Résumé des propriétés
\[\begin{array}{|ccc|} \hline & \textbf{T.F.} & \\ \hline ax(t)+by(t) &\rightleftharpoons & aX(f)+bY(f) \\ \hline x(t-t_{0}) & \rightleftharpoons & X(f)e^{-i2\pi ft_{0}} \\ \hline x(t)e^{+i2\pi f_{0}t} & \rightleftharpoons & X(f-f_{0}) \\ \hline x^{\ast }(t) & \rightleftharpoons & x^{\ast }(-f) \\ \hline x(t)~.~y(t) & \rightleftharpoons & X(f)\ast Y(f) \\ \hline x(t)\ast y(t) & \rightleftharpoons & X(f)~.~Y(f) \\ \hline x(at+b) & \rightleftharpoons & \frac{1}{\left| a\right| }X\left( \frac{f}{a}\right) e^{i2\pi \frac{b}{a}f}\\ \hline \frac{dx^{(n)}(t)}{dt^{n}} & \rightleftharpoons & \left( i2\pi f\right) ^{n}X(f) \\ \hline \left( -i2\pi t\right) ^{n}x(t) & \rightleftharpoons & \frac{dX^{(n)}(f)}{df^{n}} \\ \hline \end{array}\]
\[\begin{array}{|c|c|} \hline\hline \textbf{Formule de Parseval} & \textbf{Série de Fourier} \\ \hline\hline \int_{\mathbb{R}}x(t)y^{\ast }(t)dt=\int_{\mathbb{R}}X(f)Y^{\ast }(f)df & \underset{n\in \mathbb{Z}}{\sum }c_{n}e^{+i2\pi nf_{0}t}\rightleftharpoons \underset{n\in \mathbb{Z}}{\sum }c_{n}\delta \left( f-nf_{0}\right) \\ \hline \int_{\mathbb{R}}\left| x(t)\right| ^{2}dt=\int_{\mathbb{R}}\left| X(f)\right| ^{2}df & \\ \hline \end{array}\]
Tables
\[\begin{array}{|ccc|} \hline & \textbf{T.F.} & \\ \hline 1 & \rightleftharpoons & \delta \left( f\right)\\ \hline \delta \left( t\right) & \rightleftharpoons & 1 \\ \hline e^{+i2\pi f_{0}t} & \rightleftharpoons & \delta \left( f-f_{0}\right) \\ \hline \delta \left( t-t_{0}\right) & \rightleftharpoons& e^{-i2\pi ft_{0}} \\ \hline \amalg \hspace{-0.2cm}\amalg _{T}\left( t\right) =\underset{k\in \mathbb{Z}}{\sum }\delta \left( t-kT\right) & \rightleftharpoons & \frac{1}{T}\amalg \hspace{-0.2cm} \amalg _{1/T}\left( f\right) \\ \hline \cos \left( 2\pi f_{0}t\right) & \rightleftharpoons & \frac{1}{2}\left[ \delta \left( f-f_{0}\right)+\delta \left( f+f_{0}\right) \right] \\ \hline \sin \left( 2\pi f_{0}t\right) & \rightleftharpoons & \frac{1}{2i}\left[ \delta \left( f-f_{0}\right)-\delta \left( f+f_{0}\right) \right] \\ \hline e^{-a\left| t\right| }& \rightleftharpoons & \frac{2a}{a^{2}+4\pi ^{2}f^{2}}\\ \hline e^{-\pi t^{2}} & \rightleftharpoons & e^{-\pi f^{2}}\\ \hline \Pi _{T}\left( t\right) & \rightleftharpoons & T\frac{\sin \left( \pi Tf\right) }{\pi Tf}=T\sin c\left( \pi Tf\right) \\ \hline \Lambda _{T}\left( t\right) & \rightleftharpoons & T\sin c^{2}\left( \pi Tf\right) \\ \hline B\sin c\left( \pi Bt\right) & \rightleftharpoons &\Pi _{B}\left( f\right) \\ \hline B\sin c^{2}\left( \pi Bt\right) & \rightleftharpoons & \Lambda _{B}\left( f\right) \\ \hline \end{array}\]
Plan du cours
Chapitre 1 : Corrélations et Spectres
Transformée de Fourier
Classes de signaux déterministes et aléatoires
Propriétés de \(R_x(\tau)\) et de \(s_x(f)\)
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
Classes de signaux déterministes et aléatoires
Classe \(1\) : signaux déterministes à énergie finie
Classe \(2\) : signaux déterministes périodiques à puissance finie
Classe \(3\) : signaux déterministes non périodiques à puissance finie
Classe \(4\) : signaux aléatoires stationnaires
Signaux déterministes à énergie finie
Définition \(\; \textrm{E} = \int_{\mathbb{R}} |x(t)|^2 dt = \int_{\mathbb{R}} |X(f)|^2 df < \infty\)
Fonction d’autocorrélation
\[ R_x(\tau)=\int_{\mathbb{R}} x(t) x^*(t-\tau) dt = \langle x(t) ,x(t-\tau) \rangle \]
- Fonction d’intercorrélation
\[ R_{xy}(\tau)=\int_{\mathbb{R}} x(t) y^*(t-\tau) dt = \langle x(t) ,y(t-\tau) \rangle \]
- Produit scalaire
\[ \langle x(t) ,y(t) \rangle =\int_{\mathbb{R}} x(t) y^*(t)dt \]
Densité spectrale d’énergie
- Définition
\[ s_x(f)=\textrm{TF} \left[ R_x(\tau) \right] \]
- Propriété
\[s_x(f)= \left| X(f) \right|^2\]
Preuve
\[\begin{aligned} s_x(f)=& \int_{\mathbb{R}} \left[ \int_{\mathbb{R}} x(t) x^*(t-\tau) dt \right] \exp(- j 2 \pi f \tau) d\tau\\ & =\int_{\mathbb{R}} \left[ \int_{\mathbb{R}} x^*(t-\tau) \exp(- j 2 \pi f \tau) d \tau \right] x(t) dt \\ & =\int_{\mathbb{R}} \left[ \int_{\mathbb{R}} x^*(u) \exp \left[j 2 \pi f (u-t)\right] du \right] x(t) dt \\ & = X^*(f) X(f)\end{aligned}\]
Exemple
- Fenêtre rectangulaire
\[ x(t)= \Pi_T(t)= \left\{ \begin{array}{l} 1 \; \text{ si } \; -\frac{T}{2}<t<\frac{T}{2}\\ 0 \; \text{ sinon } \end{array} \right. \]
- Fonction d’autocorrélation
\[ R_x(\tau)=T \Lambda_T(\tau) \]
- Densité spectrale d’énergie
\[ s_x(f)=T^2 \textrm{sinc}^2 (\pi T f) = |X(f)|^2 \]
Signaux déterministes périodiques
Définition \(\;\; \textrm{P} = \frac{1}{T_0} \int_{-T_0/2}^{T_0/2} |x(t)|^2 dt < \infty\)
Fonction d’autocorrélation
\[ R_x(\tau)= \frac{1}{T_0} \int_{-T_0/2}^{T_0/2} x(t) x^*(t-\tau) dt = \langle x(t) ,x(t-\tau) \rangle \]
- Fonction d’intercorrélation
\[ R_{xy}(\tau)=\frac{1}{T_0} \int_{-T_0/2}^{T_0/2} x(t) y^*(t-\tau) dt = \langle x(t) ,y(t-\tau) \rangle \]
- Produit scalaire
\[ \langle x(t) ,y(t) \rangle = \frac{1}{T_0} \int_{-T_0/2}^{T_0/2} x(t) y^*(t)dt \]
Densité spectrale de puissance
- Définition
\[ s_x(f)=\textrm{TF} \left[ R_x(\tau) \right] \]
- Propriété
\[ s_x(f)= \sum_{k \in \mathbb{Z}} |c_k|^2 \delta(f-kf_0) \]
avec \(x(t)=\sum_{k \in \mathbb{Z}} c_k \exp(j 2 \pi k f_0 t)\).
Preuve
\[\begin{aligned} R_x(\tau)=& \sum_{k,l} c_k c_l^* \exp \left(j 2 \pi l f_0 \tau \right) \left[\frac{1}{T_0} \int_{-T_0/2}^{T_0/2} \exp \left[j 2 \pi (k - l) f_0 t \right]dt \right] \\ & =\sum_k |c_k|^2 \exp(j 2 \pi k f_0 \tau) \end{aligned}\]
Exemple
- Sinusoïde
\[ x(t)= A \cos(2 \pi f_0 t) \]
- Fonction d’autocorrélation
\[ R_x(\tau)=\frac{A^2}{2} \cos(2 \pi f_0 \tau) \]
- Densité spectrale de puissance
\[ s_x(f)=\frac{A^2}{4} \left[ \delta(f-f_0) + \delta(f+f_0)\right] \]
Signaux déterministes à puissance finie
… non périodiques
Définition \(\;\; \textrm{P} = {\underset{T \rightarrow \infty }{\lim }} \frac{1}{T}\int_{-T/2}^{T/2} |x(t)|^2 dt < \infty\)
Fonction d’autocorrélation
\[R_x(\tau)={\underset{T \rightarrow \infty }{\lim }} \frac{1}{T}\int_{-T/2}^{T/2} x(t) x^*(t-\tau) dt = \langle x(t), x(t-\tau) \rangle\]
Fonction d’intercorrélation
\[R_{xy}(\tau)={\underset{T \rightarrow \infty }{\lim }} \frac{1}{T}\int_{-T/2}^{T/2} x(t) y^*(t-\tau) dt = \langle x(t),y(t-\tau)\rangle\]
Produit scalaire
\[\langle x(t) ,y(t) \rangle ={\underset{T \rightarrow \infty }{\lim }} \frac{1}{T}\int_{-T/2}^{T/2} x(t) y^*(t)dt\]
Densité spectrale de puissance
Définition
\[s_x(f)=\textrm{TF} \left[ R_x(\tau) \right]\]
Propriété
\[s_x(f)= {\underset{T \rightarrow \infty }{\lim }} \frac{1}{T} \left|X_T(f) \right|^2\] avec
\[X_T(f)= \int_{-T/2}^{T/2} x(t) \exp(-j 2 \pi f t)dt\]
Exemple
\[x(t)=A_1 \cos(2 \pi f_1 t) + A_2 \cos(2 \pi f_2 t)\]
avec \(f_1\) et \(f_2\) non commensurables.
Signaux aléatoires stationnaires
Définitions
Moyenne : : \(E[x(t)]\) indépendant de \(t\)
Moment d’ordre \(2\) : \(E[x(t)x^*(t-\tau)]\) indépendant de \(t\)
Fonction d’autocorrélation
\[R_x(\tau)=E[x(t)x^*(t-\tau)] = \langle x(t) ,x(t-\tau) \rangle\]
Fonction d’intercorrélation
\[E[x(t)y^*(t-\tau)] = \langle x(t) ,y(t-\tau) \rangle\]
Produit scalaire
\[\langle x(t) ,y(t) \rangle = E[x(t)y^*(t)]\]
Remarque
stationnarité au sens strict, large, à l’ordre \(2\), tests de stationnarité.
Stationnaire ou non ?
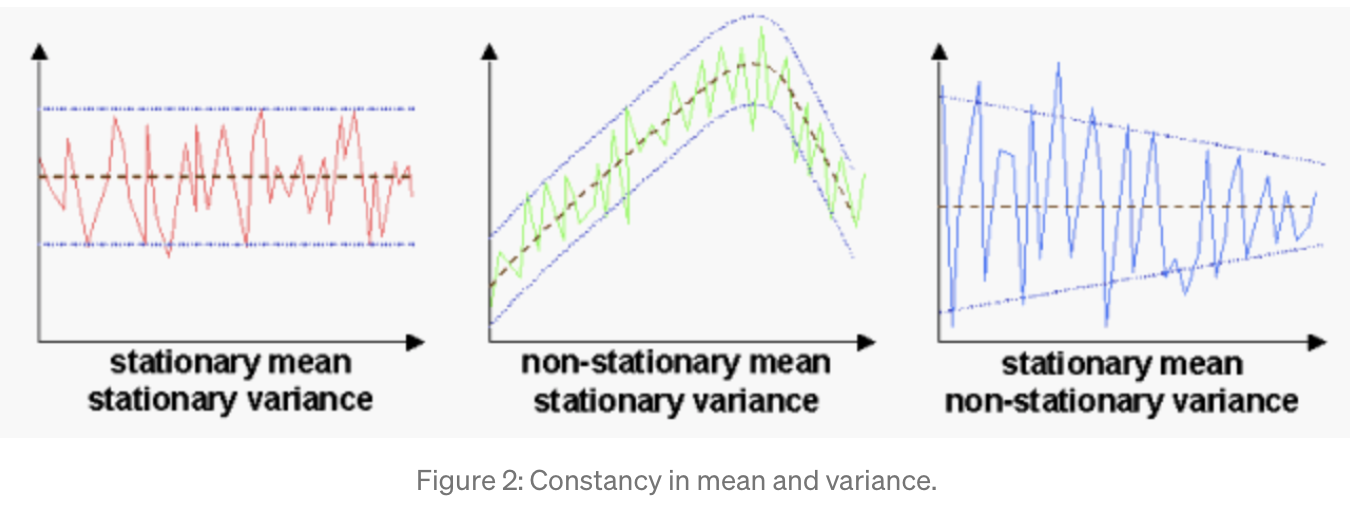
https://towardsdatascience.com/stationarity-in-time-series-analysis-90c94f27322}
Densité spectrale de puissance
- Puissance moyenne
\[P = R_x(0)= E \left[ |x(t)|^2 \right]=\int_{\mathbb{R}} s_x(f)df\]
Densité spectrale de puissance
- Définition
\[s_x(f)=\textrm{TF} \left[ R_x(\tau) \right]\]
- Propriétés
\[s_x(f)={\underset{T \rightarrow \infty }{\lim }} \frac{1}{T} E \left[ \left| X_T(f) \right|^2 \right]\]
mais en général \(X(f)\) n’existe pas !
Exemples
Exemple 1 : Sinusoïde
\[x(t)= A \cos(2 \pi f_0 t + \theta)\]
\(\theta\) v.a. uniforme sur \([0, 2\pi]\).
Fonction d’autocorrélation
\[R_x(\tau)=\frac{A^2}{2} \cos(2 \pi f_0 \tau)\]
Densité spectrale de puissance
\[s_x(f)=\frac{A^2}{4} \left[ \delta(f-f_0) + \delta(f+f_0)\right]\]
Exemples
Exemple 2 : Bruit blanc
Fonction d’autocorrélation
\[R_x(\tau)= \frac{N_0}{2} \delta(\tau)\]
Densité spectrale de puissance
\[s_x(f)= \frac{N_0}{2}\]
Plan du cours
Chapitre 1 : Corrélations et Spectres
Transformée de Fourier
Classes de signaux déterministes et aléatoires
Propriétés de \(R_x(\tau)\) et de \(s_x(f)\)
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
Propriétés de \(R_x(\tau)\)
Symétrie Hermitienne : \(R_x^*(-\tau)= R_x(\tau)\)
Valeur maximale : \(|R_x(\tau)| \le R_x(0)\)
Distance entre \(x(t)\) et \(x(t-\tau)\) : si \(x(t)\) est un signal réel
\[d^2\left[ x(t), x(t-\tau) \right]= 2 \left[ R_x(0) - R_x(\tau)\right]\]
donc \(R_x(\tau)\) mesure le lien entre \(x(t)\) et \(x(t-\tau)\).
Décomposition de Lebesgue : dans la quasi-totalité des applications, on a
\[R_x(\tau) = R_1(\tau) + R_2(\tau)\] où \(R_1(\tau)\) est une somme de fonctions périodiques et \(R_2(\tau)\) tend vers \(0\) lorsque \(\tau \rightarrow \infty\).
Propriétés de \(s_x(f)\)
DSP réelle :
\[s_x(f) \in \mathbb{R}\]
De plus, si \(x(t)\) signal réel, \(s_x(f)\) réelle paire
Positivité : \(s_x(f) \ge 0\)
Lien entre DSP et puissance/énergie :
\[P \; \textrm{ou} \; E = R_x(0) = \int_\mathbb{R} s_x(f) df\]
Décomposition :
dans la plupart des applications, on a \(s_x(f) = s_1(f) + s_2(f)\), où \(s_1(f)\) est un spectre de raies et \(s_2(f)\) un spectre continu (cas général : partie singulière).
Que faut-il savoir ?
Reconnaître si un signal est à énergie finie, à puissance finie périodique ou aléatoire.
Qu’est ce qu’un signal aléatoire stationnaire ?
Les différentes définitions d’une fonction d’autocorrélation\(R_x(\tau)\)
La définition unifiée d’une densité spectrale : \(s_x(f)\) = ?
Les différentes définitions d’une densité spectrale
Ce qu’est un bruit blanc
Ce qu’est un bruit gaussien
Propriétés de \(R_x(\tau)\)
Propriétés de \(s_x(f)\)
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Introduction
Relations de Wiener-Lee
Formule des interférences
Exemples
Chapitre 3 : Traitements Non-linéaires
Introduction
On cherche une opération avec les propriétés suivantes
Linéarité : \(T\left[ a_1 x_1(t) + a_2 x_2(t) \right] = a_1 T\left[ x_1(t) \right]+ a_2 T\left[x_2(t) \right]\)
Invariance dans le temps :
Si \(y(t) = T\left[ x(t) \right]\) alors \(T\left[ x(t-t_0) \right] = y(t-t_0)\)
Stabilité BIBO :
Si \(|x(t)| \le M_x\) alors il existe \(M_y\) tel que
\[|y(t)| =|T\left[x(t) \right]| \le M_y\]
``Limitation’’ du spectre d’un signal :
☞ Convolution
\[y(t)= x(t) * h(t) = \int_\mathbb{R} x(u)h(t-u)du = h(t) * x(t)\]
ECG avant filtrage
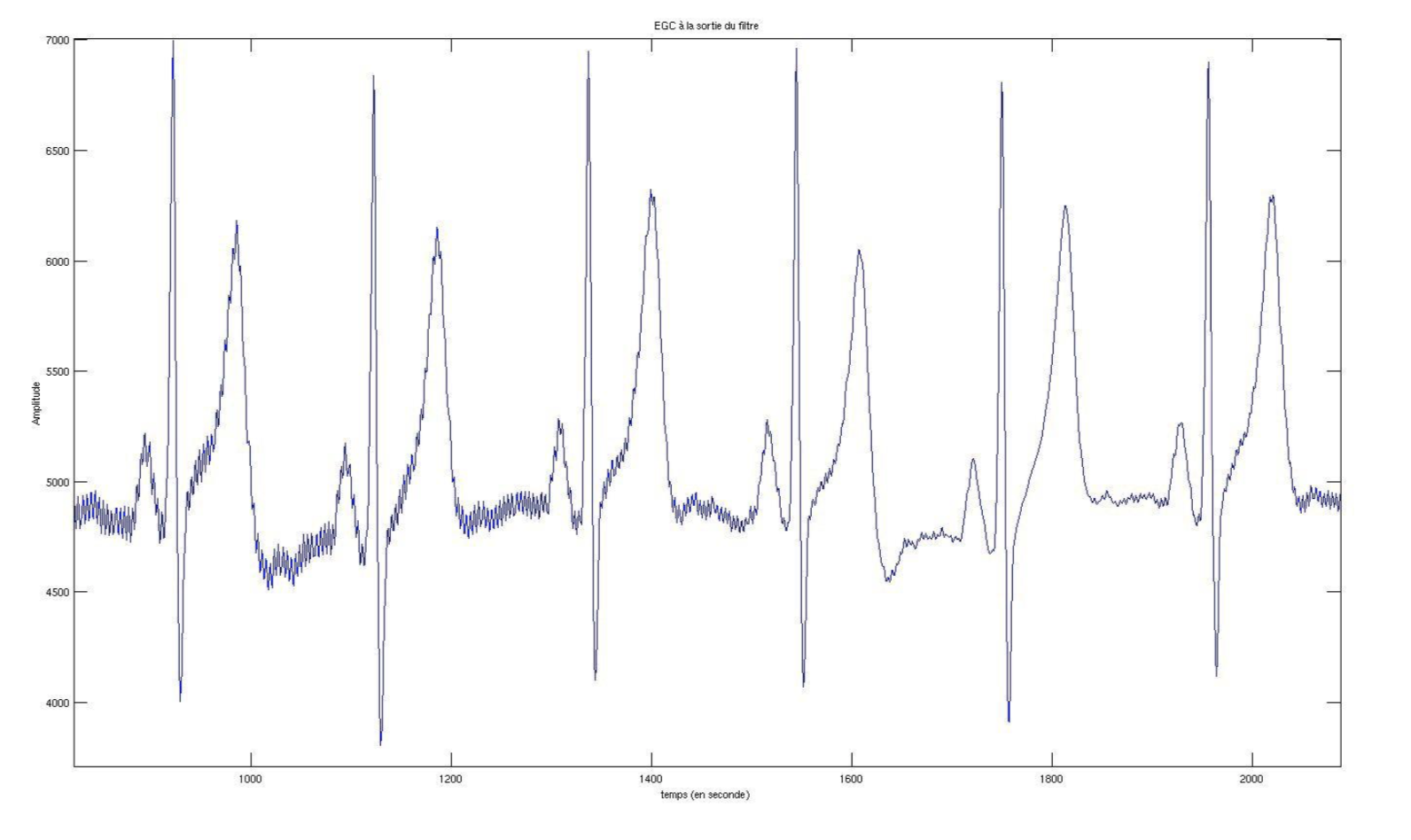
ECG après filtrage
Commentaires
- La linéarité ne suffit pas. Contre-exemple
\[y(t) =m(t)x(t)\]
- CNS de Stabilité BIBO
\[\int_\mathbb{R} |h(t)| dt < \infty, \textrm{i.e.}, h \in L^1\]
- Réponse impulsionnelle et Transmittance
\[H(f)=\textrm{TF} \left[ h(t) \right]=\int_\mathbb{R} h(t) \exp (-j 2 \pi f t) dt\]
Si \(x(t)=\delta(t)\) alors \(y(t)=h(t)\). Ceci permet d’obtenir la seule réponse impulsionnelle possible.
Réalisabilité d’un filtre
Domaine temporel
\(h(t)\) réelle
\(h(t) \in L^1\) (stabilité )
\(h(t)\) causale (filtre sans mémoire)
Domaine spectral
Symétrie hermitienne : \(H^*(-f)=H(f)\)
Ne peut se traduire
\(H(f) = -j \widetilde{H}(f)\), où \(\widetilde{H}(f) = H(f)* \frac{1}{\pi f}\) est la transformée de Hilbert de \(H\) (preuve dans le cours manuscrit).
Ecriture équivalente
En écrivant \(H(f)=H_r(f)+jH_i(f)\), on obtient
\[ \begin{aligned} H_r(f)=& H_i(f) *\frac{1}{\pi f} \\ H_i(f)=& - H_r(f) *\frac{1}{\pi f} \end{aligned} \]
Identifier une relation de filtrage linéaire
Signaux déterministes
\[y(t)= x(t)*h(t) \; \Leftrightarrow \; Y(f)= X(f) H(f)\]
Signaux aléatoires : Isométrie fondamentale
\[\textrm{Si} \; x(t) \; \overset{{I}}{{ \leftrightarrow}} \; e^{j 2 \pi f t}, \; \textrm{alors} \; y(t) \; \overset{{I}}{{\leftrightarrow}} \; e^{j 2 \pi f t} H(f)\]
Exemples
\(y(t) = \sum_{k=1}^n a_k x(t-t_k)\)
\(y(t)=x'(t)\)
\(y(t)=x(t)m(t)\)
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Introduction
Relations de Wiener-Lee
Formule des interférences
Exemples
Chapitre 3 : Traitements Non-linéaires
Relations de Wiener Lee
- Densité spectrale de puissance
\[s_y(f)=s_x(f) |H(f)|^2\]
- Intercorrélation
\[R_{yx}(\tau)=R_x(\tau) * h(\tau)\]
- Autocorrélation
\[R_y(\tau) = R_x(\tau) * h(\tau) * h^*(-\tau)\]
Preuves (signaux à énergie finie)
- Densité spectrale de puissance
\[s_y(f)=|Y(f)|^2 = |X(f)H(f)|^2 = s_x(f) |H(f)|^2\]
- Intercorrélation
\[\begin{aligned} R_{yx}(\tau)=&\int_\mathbb{R} y(u)x^*(u - \tau)du \\ =& \int_\mathbb{R} Y(f)\left[ e^{-j2 \pi f \tau} X(f) \right]^* df\\ =&\int_\mathbb{R} X(f) H(f) \left[ e^{j 2 \pi f \tau} X^*(f)\right]df\\ =&\int_\mathbb{R} s_x(f) H(f) e^{j 2 \pi f \tau} df =\textrm{TF}^{-1} [s_x(f) H(f)] \quad \textrm{CQFD} \end{aligned}\]
Preuve (signaux à puissance finie)
- Intercorrélation
\[\begin{align*} R_{yx}(\tau)=& \frac{1}{T_0} \int_{-T_0/2}^{T_0/2} y(t)x^*(t-\tau)dt \\ =& \frac{1}{T_0} \int_{-T_0/2}^{T_0/2} \left[\int_\mathbb{R} h(v) x(t-v)dv \right] x^*(t-\tau)dt \\ =&\int_\mathbb{R} h(v) \left[ \frac{1}{T_0} \int_{-T_0/2}^{T_0/2} x(t-v) x^*(t-\tau)dt \right] dv\\ =&\int_\mathbb{R} h(v) R_x(\tau - v)dv \quad \textrm{CQFD} \end{align*}\]
- etc…
Preuves (signaux aléatoires)
- Intercorrélation
\[\begin{align*} R_{yx}(\tau)=& E[ y(t)x^*(t-\tau)] \\ =& \langle y(t), x(t-\tau) \rangle \\ =& \langle e^{j2 \pi ft} H(f) , e^{j2 \pi f(t-\tau)} \rangle\\ =&\int_\mathbb{R} e^{j2 \pi ft} H(f)e^{-j2 \pi f(t-\tau)} s_X(f) df \\ =&\int_\mathbb{R} H(f)e^{j2 \pi f \tau} s_X(f) df \\ =& \; h(\tau) * R_x(\tau) \quad \textrm{CQFD} \end{align*}\]
Preuves (signaux aléatoires)
- Autocorrélation
\[\begin{align*} R_{y}(\tau)=& E[ y(t)y^*(t-\tau)] \\ =& \langle y(t), y(t-\tau) \rangle \\ =& \langle e^{j2 \pi ft} H(f) , e^{j2 \pi f(t-\tau)} H(f) \rangle\\ =&\int_\mathbb{R} e^{j2 \pi ft} H(f)e^{-j2 \pi f(t-\tau)} H^*(f) s_x(f) df \\ =&\int_\mathbb{R} |H(f)|^2 s_x(f) e^{j2 \pi f \tau} df \\ =& \textrm{TF}^{-1} \{ s_x(f) |H(f)|^2 \} \\ =& \; h(\tau) * h^*(-\tau) * R_x(\tau) \quad \textrm{CQFD} \end{align*}\]
Preuves (signaux aléatoires)
- Autocorrélation
\[R_{y}(\tau)= \textrm{TF}^{-1} \{ s_x(f) |H(f)|^2 \}\]
- Densité Spectrale de Puissance
\[s_y(f)=s_x(f) |H(f)|^2 \quad \textrm{CQFD}\]
Valeur moyenne
- Propriété
\[E[Y(t)]=E[X(t)] H(0)\]
- Preuve
\[\begin{align*} E[Y(t)]=& E\left[ \int_\mathbb{R} X(t-u)h(u)du \right] \\ =& \int_\mathbb{R} E[X(t-u)] h(u)du \\ =& E[X(t)] \int_\mathbb{R} h(u)du \quad \textrm{(signal stationnaire)}\\ =& E[X(t)] H(0) \quad \textrm{CQFD} \end{align*}\]
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Introduction
Relations de Wiener-Lee
Formule des interférences
Exemples
Chapitre 3 : Traitements Non-linéaires
Formule des interférences
- Hypothèses
\[y_1(t)= x(t)*h_1(t) \; \textrm{et} \; y_2(t)= x(t)*h_2(t)\]
- Conclusion
\[R_{y_1 y_2}(\tau) = \int_\mathbb{R} s_x(f) H_1(f) H_2^*(f) e^{j 2\pi f \tau} df\]
Preuve (signaux à énergie finie)
\[\begin{align*} R_{y_1 y_2}(\tau)&= \int y_1(t) y_2^*(t-\tau) dt =\int_\mathbb{R} Y_1(f) \left[ Y_2(f) e^{-j 2 \pi f \tau} \right]^* df \\ & = \int_\mathbb{R} H_1(f) H_2^*(f) e^{j 2 \pi f \tau} s_x(f) df \quad \textrm{CQFD} \end{align*}\]
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Introduction
Relations de Wiener-Lee
Formule des interférences
Exemples
Chapitre 3 : Traitements Non-linéaires
Exemples
Filtre Passe-bas
- Transmittance
\[H(f)= \Pi_F(f)\]
- Réponse impulsionnelle
\[h(t)= F \textrm{sinc} \left( \pi F t \right)\]
non causale et \(\notin L^1 \; \Rightarrow \;\) troncature + décalage
Filtres liaisons montante et descendante d’une chaîne de transmission
Filtre adapté : maximisation du SNR
- Signal observé
\[x(t)=s(t)+n(t),\qquad t\in \left[ 0,T\right] \]
\(s(t)\) signal déterministe à énergie finie et \(n(t)\) signal aléatoire stationnaire de moyenne nulle et de densité spectrale de puissance \(s_n(f)\).
- Filtrage
\[y(t) =y_{s}(t)+y_{n}(t) =s(t)\ast h(t)+n(t)\ast h(t)\]
- Rapport signal sur bruit à l’instant \(t=t_0\)
\[\text{SNR}(t_{0})=\frac{y_{s}^{2}(t_{0})}{E\left[ y_{n}^{2}(t_{0})\right] }\]
Expression équivalente du SNR
\[SNR(t_{0})=\frac{y_{s}^{2}(t_{0})}{E\left[ y_{n}^{2}(t_{0})\right] }=\frac{\left| \int_{\Bbb{R}}H(f)S(f)e^{j2\pi ft_{0}}df\right|^{2}}{\int_{\Bbb{R}}\left| H(f)\right| ^{2}s_{n}(f)df} \]
- Numérateur
\[y_{s}(t)=TF^{-1}\left[ S(f)H(f)\right] =\int_{\Bbb{R}}H(f)S(f)e^{j2\pi ft}df\]
Dénominateur
- Wiener Lee
\[s_{y_{n}}(f)=s_{n}(f)\left| H(f)\right| ^{2}\]
- Puissance
\[P_{y_{n}} =E\left[ y_{n}^{2}(t_{0})\right] =R_{y_{n}}\left( 0\right)=\int_{\Bbb{R}}s_{n}(f)\left| H(f)\right| ^{2}df\]
Inégalité de Cauchy-Schwartz
\[\left| \int_{\Bbb{R}}a(f)b^{\ast }(f)df\right| ^{2}\leq \int_{\Bbb{R}}a(f)a^{\ast }(f)df\int_{\Bbb{R}}b(f)b^{\ast }(f)df\]
- Numérateur
\[\left| \int_{\Bbb{R}}H(f)S(f)e^{j2\pi ft_0}df\right|^2 = \left| \int_{\Bbb{R}}a(f)b^{\ast }(f)df\right| ^{2}\]
avec \(a(f)=\sqrt{s_{n}(f)}H(f)\) et \(b(f)=\frac{S^{\ast }(f)}{\sqrt{s_{n}(f)}}e^{-j2\pi ft_{0}}\).
- Dénominateur
\[\int_{\Bbb{R}}s_{n}(f)\left| H(f)\right| ^{2}df = \int_{\Bbb{R}}a(f)a^{\ast }(f)df\]
Expression du filtre adapté
- Cauchy-Schwartz
\[SNR(t_{0})=\frac{\left| \int_{\Bbb{R}}H(f)S(f)e^{j2\pi ft_{0}}df\right| ^{2}}{\int_{\Bbb{R}}\left| H(f)\right| ^{2}s_{n}(f)df} \le \int_{\Bbb{R}}b(f)b^{\ast }(f)df\] avec égalité pour \(a(f)= k b(f)\), i.e.,
\[H(f)=k\dfrac{S^{\ast }(f)}{s_{n}(f)}e^{-j2\pi ft_{0}}\]
- Cas d’un bruit blanc
\[H(f)=KS^{\ast }(f)e^{-j2\pi ft_{0}} \Leftrightarrow h(t)=Ks^{\ast }\left( t_{0}-t\right)\] Symétrie oy + Translation
SNR maximum
- Définition
\[SNR(t_{0})^{\max } =\int_{\Bbb{R}}b(f)b^{\ast }(f)df =\int_{\Bbb{R}}\frac{2}{N_{0}}\left| S(f)\right| ^{2}df=\frac{2E}{N_{0}}\] où \(E\) est l’énergie du signal. On voit donc que le le rapport signal à bruit maximal ne dépend pas de la forme du signal mais uniquement de son énergie.
- Page wikipedia Matched Filter

Que faut-il savoir ?
Reconnaître une relation de filtrage linéaire.
Densité spectrale de puissance de la sortie d’un filtre
Intercorrélation entre l’entrée et la sortie d’un filtre
Moyenne de la sortie d’un filtre
Formule des interférences
Réponse impulsionnelle causale et \(\in \mathcal{L}^1\) , sinon…
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
- Introduction
- Quadrateur
- Quantification
Introduction
- Transformation sans mémoire
\[y(t)= g \left[ x(t) \right]\]
Exemples
- Quadrateur
\[y(t) = x^2 (t)\]
- Quantification
\[y(t) = x_Q (t)\]
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
- Introduction
- Quadrateur
- Quantification
Quadrateur
- Signaux déterministes
\[Y(f) = X(f) * X(f)\]
Exemples
- Sinusoïde : \(x(t) = A \cos (2 \pi f_0 t)\)
\[Y(f) =\frac{A^2}{2} \delta(f) + \frac{A^2}{4} \left[\delta(f-2f_0)+ \delta(f+2 f_0) \right]\]
Disparition de la fréquence \(f_0\) et apparition de la fréquence \(2 f_0\)
Somme de sinusoïdes : Termes d’intermodulation
Sinus cardinal : doublement de la largeur de bande
Signal aléatoire gaussien
Définition
On dit qu’un signal aléatoire \(X(t)\) est gaussien si pour tout ensemble d’instants \((t_1,...,t_n)\), le vecteur \(\left[ X(t_1),...,X(t_n) \right]^T\) est un vecteur gaussien de \(\mathbb{R}^n\).
Loi univariée de \(X(t)\)
La loi de \(X(t)\) est alors une loi gaussienne de densité
\[p[X(t)]=\frac{1}{\sqrt{2 \pi \sigma^2(t)}} \exp \left\{ - \frac{\left[ X(t) - m(t) \right]^2 }{2 \sigma^2(t)} \right\}.\]
Si le signal \(X(t)\) est stationnaire au sens large alors
\[m(t)=E[X(t)]=m, \; \text{et} \; \sigma^2(t)=E[X^2(t)] - E^2[X(t)]=R_X(0)-m^2.\]
donc les paramètres de la densité de \(X(t)\) sont indépendants du temps.
Signal aléatoire gaussien
Loi bivariée de \([X(t), X(t-\tau)]\)
La loi du vecteur \(\boldsymbol{V}(t)=[X(t), X(t-\tau)]^T\) est alors une loi gaussienne de \(\mathbb{R}^2\) de densité
\[p[x(t),x(t-\tau)]=\frac{1}{2 \pi \sqrt{|\boldsymbol{\Sigma}(t)|}} \exp \left\{ - \frac{1}{2} \left[ \boldsymbol{V}(t) - \boldsymbol{m}(t) \right]^T \boldsymbol{\Sigma}^{-1}(t) \left[ \boldsymbol{V}(t) - \boldsymbol{m}(t) \right]\right\}.\]
où \(\boldsymbol{m}(t)=[ m_1(t), m_2(t) ]^T \in \mathbb{R}^2\) est le vecteur moyenne, avec \(m_1(t)= E[X(t)]\) et \(m_2(t)=E[X(t-\tau)]\), et \(\boldsymbol{\Sigma}(t) \in \mathcal{M}_2(\mathbb{R})\) est la matrice de covariance définie par
\[\boldsymbol{\Sigma}(t) = \left( \begin{array}{ll} \sigma_1^2(t,\tau) & \sigma_{1,2}(t,\tau) \\ \sigma_{1,2}(\tau) & \sigma_2^2(t, \tau) \end{array} \right)\]
où \(\sigma_1^2(t,\tau)\) et \(\sigma_2^2(t,\tau)\) sont les variances de \(X(t)\) et de \(X(t-\tau)\) et \(\sigma_{1,2}(t,\tau)\) est la covariance \([ X(t), X(t-\tau)]^T\). Si le signal \(X(t)\) est stationnaire au sens large alors
\[\sigma_{i}(t,\tau)= R_X(0)-m^2 \; \text{et} \; \sigma_{1,2}(t,\tau)=E[X(t)X(t-\tau)] - E[X(t)] E[X(t-\tau)]=R_X(\tau)-m^2.\]
donc les paramètres de la densité de \(\boldsymbol{V}(t)\) sont indépendants du temps.
Stationnarité de \(Y(t)=g[X(t)]\)
Si \(X(t)\) est un signal aléatoire stationnaire, alors pour toute non-linéarité \(g\), \(Y(t)\) est également un signal aléatoire stationnaire. En effet,
- Moyenne
\[E[Y(t)]=E \left\{ g[X(t)] \right\}=\int g[x(t)] p[x(t)] dx(t).\] Comme les paramètres de \(p[x(t)]\) ne dépendent que de \(R_X(0)\) et de \(m\), \(E[Y(t)]\) est une quantité indépendante de \(t\).
- Fonction d’autocorrélation
\[E\left[ Y(t) Y(t-\tau) \right] = \int \int g[x(t)] g[x(t-\tau)] p[x(t),x(t-\tau)] dx(t) dx(t-\tau).\] Comme les paramètres de \(p[x(t), x(t-\tau)]\) ne dépendent que de \(R_X(\tau)\), \(R_X(0)\) et de \(m\), \(E[Y(t)Y(t-\tau)]\) est une quantité indépendante de \(t\).
Le signal \(Y(t)\) est donc stationnaire au sens large. Sa moyenne dépend de \(R_X(0)\) et de \(m\) et sa fonction d’autocorrélation dépend de \(R_X(\tau)\), \(R_X(0)\) et de \(m\).
Quadrateur pour signaux aléatoires
Théorème de Price
Hypothèses
\((X_1,X_2)\) vecteur Gaussien de vecteur moyenne nul
\(Y_1=g(X_1)\) et \(Y_2=g(X_2)\)
Conclusion
\[\frac{\partial E(Y_1 Y_2) }{\partial E(X_1 X_2)} = E \left( \frac{\partial Y_1}{\partial X_1} \frac{\partial Y_2}{\partial X_2} \right)\]
Application au quadrateur
\[R_Y(\tau) = 2 R_X^2(\tau) + K\]
Détermination de \(K\)
- Moments d’une loi Gaussienne centrée
\[E \left( X^{2n+1} \right) = 0 , \; E \left( X^{2n} \right) = [(2n-1)\times (2n-3) ... \times 3 \times 1] \sigma^{2n}\]
- \(\tau=0\)
\[K = R_Y(0) - 2 R_X^2(0) = 3 R_X^2(0) - 2 R_X^2(0) =R_X^2(0)\]
- \(\tau \rightarrow +\infty\)
\[K = R_Y(+ \infty)- 2 R_X(+ \infty) = R_X^2(0) \]
- Autocorréation
\[R_Y(\tau) = 2 R_X^2(\tau) + R_X^2(0)\]
Summary
- Autocorréation
\[R_Y(\tau) = 2 R_X^2(\tau) + R_X^2(0)\]
- Densité spectrale de puissance
\[s_Y(f) = 2 s_X(f) * s_X(f) + R_X^2(0) \delta(f)\]
Plan du cours
Chapitre 1 : Corrélations et Spectres
Chapitre 2 :Filtrage Linéaire
Chapitre 3 : Traitements Non-linéaires
- Introduction
- Quadrateur
- Quantification
Quantification
- Principe :
\[x_Q(t) =i \Delta q_i =x_i \; \textrm{et} \; x_i - \frac{\Delta q_i}{2} \le x(t) \le x_i + \frac{\Delta q_i}{2}\]
Définitions :
Pas de quantification : \(\Delta q_i\)
Quantification uniforme : \(\Delta q_i = \Delta q = \frac{2 A_{\max}}{N}\)
Niveaux de quantification : \(x_i\)
Nombre de bits de quantification : \(N=2^n\)
Erreur de quantification
Hypothèses :
\(\epsilon(t)\) suit la loi uniforme sur \(\left[-\frac{\Delta q}{2} , \frac{\Delta q}{2} \right]\), i.e., \(N \ge 2^8\)
Rapport signal sur bruit de quantification :
\[\textrm{SNR}_{\textrm{dB}}=10 \log_{10} \left(\frac{\sigma^2_x}{\sigma^2_{\epsilon}}\right)\]
Variance du bruit : \(\sigma^2_{\epsilon} = \frac{(\Delta q)^2}{12}\)
Sinusoïde : \(\sigma^2_x= \frac{A^2}{2}\)
Conclusion :
\[\textrm{SNR}_{\textrm{dB}}= 6n + 1.76\]
Remarques
Généralisation à un signal gaussien :
\[2 S \sigma = N \Delta q \; \Rightarrow \; \textrm{SNR}_{\textrm{dB}}= 6n + ...\]
Quantification non uniforme
Que faut-il savoir?
Traitement non-linéaire : = possibilité de créer de nouvelles fréquences
Savoir appliquer le théorème de Price. Intérêt ?
Définition et propriétés de la quantification
Savoir calculer le rapport signal sur bruit de quantification
